- Einzel- und Doppel-Laserlinien-Extraktion in eine Tiefenkarte
- Bequeme und leistungsstarke 3D-Kalibrierung für Laser-Triangulations-Setups
- Kompatibel mit den Framegrabbern Coaxlink Quad 3D-LLE und Coaxlink Quad CXP-12 3D-LLE
Beschreibung

3D-Laserlinien-Extraktion in eine Tiefenkarte
Easy3D generiert eine Tiefenkarte aus einer Reihe von Bildern, die eine auf das untersuchte Objekt projizierte Laserlinie enthalten. Jedes Pixel der resultierenden Tiefenkarte enthält die Position der Laserlinie im Bild. Es werden mehrere Extraktionsmodi sowie verschiedene Filter unterstützt. Der Software-Linienextraktor ist vollständig kompatibel mit der Hardware-Implementierung im Coaxlink Quad 3D-LLE-Framegrabber.
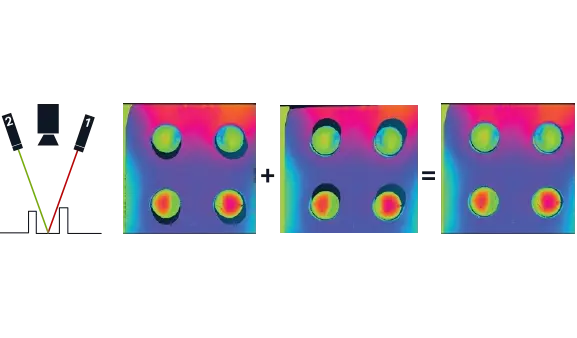
Doppelte Laserlinien-Extraktion
Der durch Software- und Hardware-Implementierungen unterstützte Prozess der doppelten Laserlinien-Extraktion reduziert den Effekt von Okklusionen. Okklusionen treten auf, wenn bestimmte Teile der Objekte von keinem Laser beleuchtet werden. Durch die Verwendung von zwei Lasern mit unterschiedlichen Winkeln werden diese undefinierten Bereiche reduziert. Die in Easy3DLaserLine enthaltene objektbasierte Kalibrierung ermöglicht die Kombination der erfassten Daten zu einer einzigen kalibrierten Punktwolke.
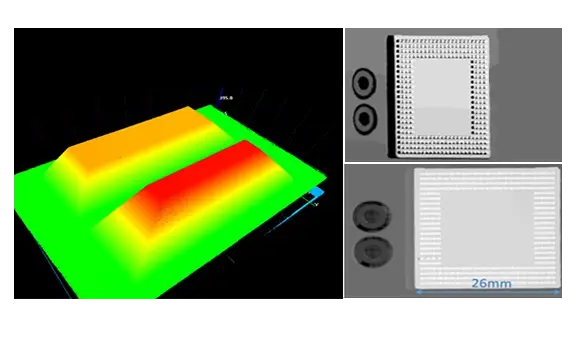
Kalibrierung
Einige Verarbeitungsschritte können direkt auf einer Tiefenkarte durchgeführt werden. Die meisten 3D-Messungen erfordern jedoch verzerrungsfreie Daten und metrische Darstellungen, weshalb eine Kalibrierung der Lasertriangulationsanlage erforderlich ist. Easy3D berechnet ein Kalibrierungsmodell, das auf Tiefenkarten angewendet wird, um diese in kalibrierte 3D-Punktwolken umzuwandeln. Dieses Kalibrierungsmodell basiert auf der Tiefenkarte eines Referenzobjekts, die mit der zu kalibrierenden Lasertriangulationsanlage erfasst wurde.
Weitere Vorteile
Neo-Lizenzierungssystem
Neo ist das neue Lizenzierungssystem. Es ist zuverlässig, auf dem neuesten Stand der Technik und steht nun für die Speicherung von Open eVision- und eGrabber-Lizenzen zur Verfügung. Mit Neo können Sie wählen, wo Sie Ihre Lizenzen aktivieren möchten, entweder auf einem Neo-Dongle oder in einem Neo-Software-Container. Sie kaufen eine Lizenz und entscheiden später.
Neo-Dongles bieten robuste Hardware und die Flexibilität, von einem Computer auf einen anderen übertragen zu werden. Neo-Software-Container benötigen keine spezielle Hardware, sondern sind mit dem Computer verbunden, auf dem sie aktiviert wurden.
Neo wird mit einem eigenen, dedizierten Neo License Manager ausgeliefert, der in zwei Varianten erhältlich ist: einer intuitiven, benutzerfreundlichen grafischen Benutzeroberfläche und einer Befehlszeilenschnittstelle, die eine einfache Automatisierung der Neo-Lizenzierungsverfahren ermöglicht.
Alle Open eVision-Bibliotheken für Windows und Linux
- Microsoft Windows 11, 10 für x86-64 (64-Bit) Prozessorarchitektur
- Microsoft Windows 11, 10 IoT Enterprise auf x86_64-Systemen
- Linux für x86-64 (64-Bit) und ARMv8-A (64-Bit) Prozessorarchitekturen mit einer glibc-Version größer oder gleich 2.18

Open eVision 3D Studio
Open eVision 3D Studio ist die Evaluierungs- und Prototyping-Anwendung von Open eVision.
Die Anwendung Open eVision 3D Studio vereinfacht die Konfiguration von einzelnen und doppelten 3D-Laserlinien-Inspektionssystemen unter Verwendung des Coaxlink Quad 3D-LLE-Framegrabber sowie der Bibliotheken Easy3D und Easy3DLaserLine erheblich.
Open eVision 3D Studio ist kostenlos und erfordert keine Lizenz.
Software
- Host PC Operating System
-
Open eVision is a set of 64-bit libraries that require an Intel compatible processor with the SSE4 instruction set or an ARMv8-A compatible processor.
Open eVision can be used on the following operating systems:
Microsoft Windows 11, 10 for x86-64 (64-bit) processor architecture
Microsoft Windows 11, 10 IoT Enterprise for x86-64 systems
Linux for x86-64 (64-bit) and ARMv8-A (64-bit) processor architectures with a glibc version greater or equal to 2.18
Remote connections
Remote connections are allowed using remote desktop, TeamViewer or any other similar software.
Virtual machines
Virtual machines are supported. Microsoft Hyper-V, Oracle VirtualBox and libvirt hypervisors have been successfully tested.
Only the Neo Licensing System is compatible with virtualization.
Minimum requirements:
2 GB RAM to run an Open eVision application
8 GB RAM to compile an Open eVision application
Between 100 MB and 2 GB free hard disk space for libraries, depending on selected options.
- APIs
-
Supported programming languages :
The Open eVision libraries and tools support C++, Python and the programming languages compatible with the .NET (C#, VB.NET)
C++ requirements: A compiler compatible with the C++ 11 standard is required to use Open eVision
Python requirements: Python 3.11 or later is required to use the Python bindings for Open eVision
.NET requirements: .NET framework 4.8 (or later) or the .NET platform 6.0 (or later) are supported
Supported Integrated Development Environments:
Microsoft Visual Studio 2017 (C++, C#, VB .NET, C++/CLI)
Microsoft Visual Studio 2019 (C++, C#, VB .NET, C++/CLI)
Microsoft Visual Studio 2022 (C++, C#, VB .NET, C++/CLI)
QtCreator 4.15 with Qt 5.12
Ordering Information
- Product status
-
Released
- Product code - Description
-
PC4186 Open Easy3DLaserLine for USB dongle
PC4336 Open eVision Easy3DLaserLine
- Included libraries
-
Easy3D
Easy3DLaserLine
- Related products
-
PC1637 Coaxlink Quad 3D-LLE
PC6512 eVision/Open eVision USB Dongle (empty)
PC6514 Neo USB Dongle (empty)