- Verarbeitung und Verwaltung von Punktwolken
- Flexible ZMap-Erstellung
- 3D-Verarbeitungsfunktionen zum Zuschneiden, Dezimieren, Anpassen und Ausrichten von Punktwolken
- Kompatibel mit vielen 3D-Sensoren
- Interaktive 3D-Anzeige mit dem 3D-Viewer
Beschreibung
Punktwolkenverarbeitung
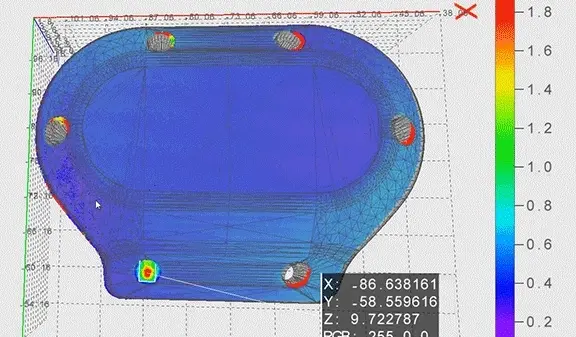
Nach der Kalibrierung enthält die 3D-Punktwolke verzerrungsfreie Daten unter Verwendung eines realen 3D-Koordinatensystems. Verarbeiten Sie 3D-Punktwolken mit Easy3D-Funktionen wie Koordinatentransformation, Punktwolken-Ausschnitt und -Reduzierung, Ebenenermittlung und -anpassung oder Teileausrichtung.

Kompatibilität mit 3D-Sensoren
Die Easy3D-Bibliothek kann Daten von 3D-Sensoren von Drittanbietern wie Automation Technology, Azure Kinect, Benano, Heliotis, IDS Ensenso, Intel Realsense, Lucid Helios, LMI Gocator, Mech-Mind, Nerian Ruby, Photoneo PhoXi, Shenzhen SinceVision (SSZN), Zivid und anderen importieren. Punktwolken und ZMaps werden effizient verwaltet und ermöglichen die Durchführung von 3D-Verarbeitungen und -Analysen.
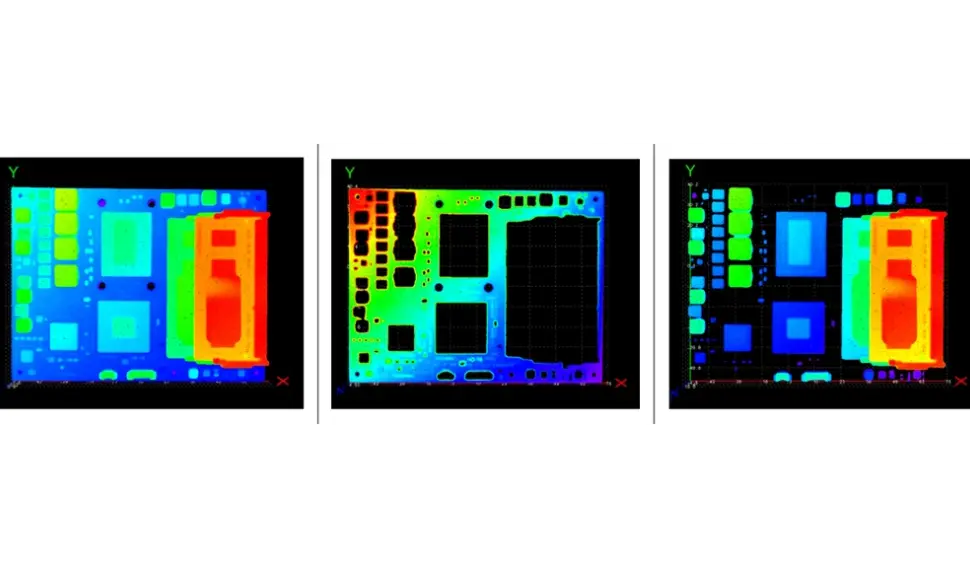
ZMap-Generierung
Eine ZMap ist die Projektion einer Punktwolke auf eine Referenzebene, wobei Entfernungen als Graustufenwerte von Pixeln gespeichert werden. ZMaps sind verzerrungsfrei und verfügen über ein metrisches Koordinatensystem. Easy3D bietet Funktionen zur Erstellung solcher ZMaps. Noch wichtiger ist, dass Sie alle Open eVision 2D-Verarbeitungsfunktionen auf ZMaps anwenden können: Filterung und Schwellenwertbildung mit EasyImage, Blob-Analyse mit EasyObject, Subpixel-Messung mit EasyGauge, Musterabgleich mit EasyFind und EasyMatch.
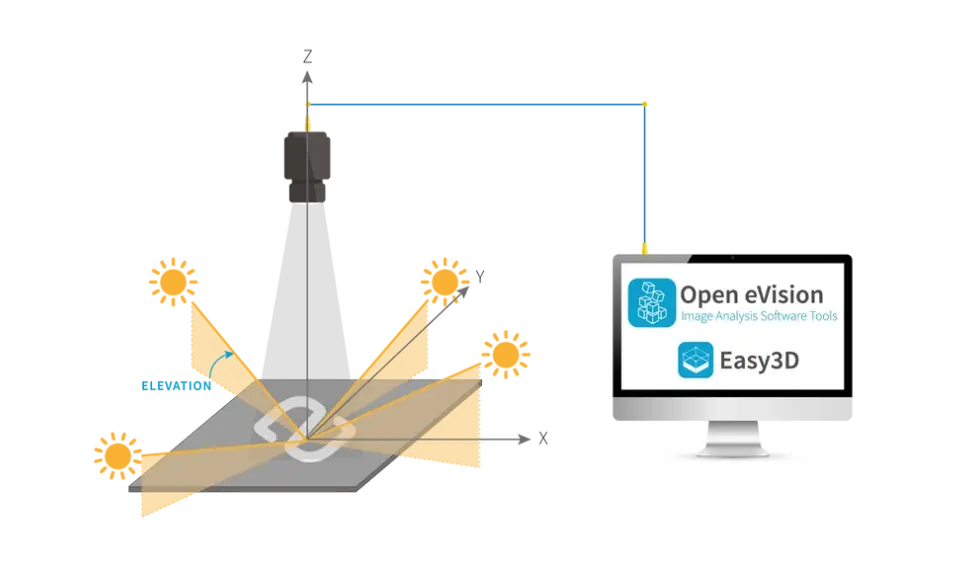
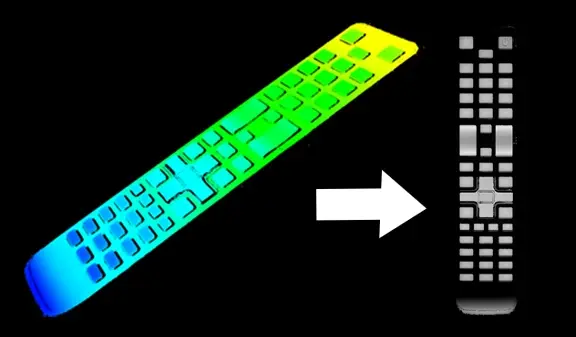
Photometrische Stereotechnik für die 3D-Inspektion der Oberflächenstruktur
Die photometrische Stereofunktion schätzt die Ausrichtung und Albedo jedes Punktes einer Oberfläche, indem sie mehrere Bilder derselben Oberfläche aus einem einzigen Blickwinkel, jedoch unter Beleuchtung aus verschiedenen Richtungen, aufnimmt. Das Verfahren eignet sich für die Inspektion von Details (Fehlern oder Informationen) auf der Oberfläche von Objekten, die mit einem einzigen Kamera-Licht-Paar nicht sichtbar sind, und macht kleine Abweichungen in der Oberflächenkrümmung oder -struktur sichtbar. Es kann als Vorverarbeitungsphase für andere Bibliotheken verwendet werden, wie z. B.:
- Code-Lesen: EasyMatrixCode, EasyQRCode oder EasyBarCode
- Optische Zeichenerkennung: EasyOCR
- Ausrichtung: EasyMatch, EasyFind
- Messung: EasyGauge
- Fehlererkennung: EasyObject, EasySegment
Photometrisches Stereo ist in der Easy3D-Bibliothek verfügbar.
3D-Betrachter
Verwenden Sie die 3D-Viewer-Klasse von Easy3D, um eine interaktive 3D-Anzeige zu erstellen. Der 3D-Viewer kann Punktwolken und 3D-Objekte anzeigen. Er verwendet die OpenGL-Schnittstelle und erfordert ein kompatibles Anzeigegerät.
Weitere Vorteile
Neo-Lizenzierungssystem
Neo ist das neue Lizenzierungssystem. Es ist zuverlässig, auf dem neuesten Stand der Technik und steht nun für die Speicherung von Open eVision- und eGrabber-Lizenzen zur Verfügung. Mit Neo können Sie wählen, wo Sie Ihre Lizenzen aktivieren möchten, entweder auf einem Neo-Dongle oder in einem Neo-Software-Container. Sie kaufen eine Lizenz und entscheiden später.
Neo-Dongles bieten robuste Hardware und die Flexibilität, von einem Computer auf einen anderen übertragen zu werden. Neo-Software-Container benötigen keine spezielle Hardware, sondern sind mit dem Computer verbunden, auf dem sie aktiviert wurden.
Neo wird mit einem eigenen, dedizierten Neo License Manager ausgeliefert, der in zwei Varianten erhältlich ist: einer intuitiven, benutzerfreundlichen grafischen Benutzeroberfläche und einer Befehlszeilenschnittstelle, die eine einfache Automatisierung der Neo-Lizenzierungsverfahren ermöglicht.
Alle Open eVision-Bibliotheken für Windows und Linux
- Microsoft Windows 11, 10 für x86-64 (64-Bit) Prozessorarchitektur
- Microsoft Windows 11, 10 IoT Enterprise auf x86_64-Systemen
- Linux für x86-64 (64-Bit) und ARMv8-A (64-Bit) Prozessorarchitekturen mit einer glibc-Version größer oder gleich 2.18

Open eVision 3D Studio
Open eVision 3D Studio ist die Evaluierungs- und Prototyping-Anwendung von Open eVision.
Die Anwendung Open eVision 3D Studio vereinfacht die Konfiguration von einzelnen und doppelten 3D-Laserlinien-Inspektionssystemen unter Verwendung des Coaxlink Quad 3D-LLE-Framegrabber sowie der Bibliotheken Easy3D und Easy3DLaserLine erheblich.
Open eVision 3D Studio ist kostenlos und erfordert keine Lizenz.
Software
- Host PC Operating System
-
Open eVision is a set of 64-bit libraries that require an Intel compatible processor with the SSE4 instruction set or an ARMv8-A compatible processor.
Open eVision can be used on the following operating systems:
Microsoft Windows 11, 10 for x86-64 (64-bit) processor architecture
Microsoft Windows 11, 10 IoT Enterprise for x86-64 systems
Linux for x86-64 (64-bit) and ARMv8-A (64-bit) processor architectures with a glibc version greater or equal to 2.18
Remote connections
Remote connections are allowed using remote desktop, TeamViewer or any other similar software.
Virtual machines
Virtual machines are supported. Microsoft Hyper-V, Oracle VirtualBox and libvirt hypervisors have been successfully tested.
Only the Neo Licensing System is compatible with virtualization.
Minimum requirements:
2 GB RAM to run an Open eVision application
8 GB RAM to compile an Open eVision application
Between 100 MB and 2 GB free hard disk space for libraries, depending on selected options.
- APIs
-
Supported programming languages :
The Open eVision libraries and tools support C++, Python and the programming languages compatible with the .NET (C#, VB.NET)
C++ requirements: A compiler compatible with the C++ 11 standard is required to use Open eVision
Python requirements: Python 3.11 or later is required to use the Python bindings for Open eVision
.NET requirements: .NET framework 4.8 (or later) or the .NET platform 6.0 (or later) are supported
Supported Integrated Development Environments:
Microsoft Visual Studio 2017 (C++, C#, VB .NET, C++/CLI)
Microsoft Visual Studio 2019 (C++, C#, VB .NET, C++/CLI)
Microsoft Visual Studio 2022 (C++, C#, VB .NET, C++/CLI)
QtCreator 4.15 with Qt 5.12
Ordering Information
- Product status
-
Released
- Product code - Description
-
PC4181 Open Easy3D for USB dongle
PC4331 Open eVision Easy3D
- Related products
-
PC1637 Coaxlink Quad 3D-LLE
PC6512 eVision/Open eVision USB Dongle (empty)
PC6514 Neo USB Dongle (empty)